Walking robots have advantages over other types of locomotion when looking at real world applications: They can traverse unstructured terrains that are too complex for wheeled robots. They are more stable and can carry greater loads than flying robots. They can be used to create detailed 3D maps of their environment and to find people that may be trapped underneath things in disaster zones.

As with all other types of field robots, waterproofing and energy efficiency are two major research questions. However, much work within NCCR Robotics focuses on a third research question, how to teach a robot to walk over uneven terrain, such that it doesn’t trip or get stuck. If you consider how your body reacts when you walk, you will notice that your joins automatically stiffen or soften, depending on the surface that you are walking on – that your walking upright requires constant use from the muscles in your legs, ankles, feet, hips and stomach, all of which is moderated by your brain without you having to think about it. Our researchers are using the animal kingdom as inspiration (bioinspired robotics) to teach their robots how to walk on uneven and unstructured surfaces, quickly and effectively, while recovering from stumbles without falling.
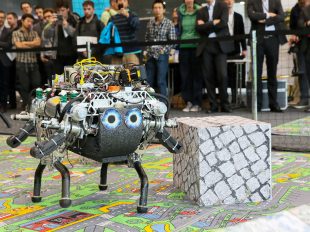
Our Walking Robots



People


